



Am testat eficienţa sistemelor 4×4 la 14 maşini dintre care şapte SUV-uri şi şapte limuzine/break-uri utilizând un stand cu role care simulează aderenţa zero. Care este cel mai bun 4×4? Rezultatele sunt surprinzătoare. Text: Roberto Boni; Adaptare: Răzvan Măgureanu; Foto: Quattroruote
De această dată am stat departe de zăpadă şi de gheaţa adevărată. Pentru a verifica funcţionarea diverselor sisteme de tracţiune integrală am utilizat echipamentul pe care îl vedeţi în aceste pagini. Este vorba de un stand cu role cu înclinare variabilă care îţi permite să simulezi plecarea lentă din pantă cu una sau mai multe roţi lipsite complet de aderenţă. Astfel, se poate detecta şi analiza cu precizie maximă timpul necesar ca maşina să plece din loc, care scoate în evidenţă de fapt reacţia mai rapidă sau mai lentă a sistemului de tracţiune integrală.
În acest moment, piaţa oferă numeroase modele cu tracţiune integrală. Nu vorbim doar de SUV-uri ci şi de limuzine, breakuri sau crossovere. În acest test am ales să grupăm cele 14 modele în două categorii: cea a SUV-urilor şi cea a limuzinelor şi breakurilor. Am ales modele reprezentative pentru piaţă şi chiar dacă Dacia Duster lipseşte, trebuie să menţionăm că sistemul de tracţiune integrală este similar cu cel al lui Nissan Qashqai, prezent în test.
 Testul s-a desfăşurat pe durata a două zile pe poligonul de la Vairano. În prima probă am vrut să verificăm abilitatea sistemului de tracţiune integrală de a transfera cuplul pe cealaltă punte decât cea antrenată în mod normal de motor (faţă când sistemul de tracţiune integrală are la bază transmisia faţă şi spate când sistemul de tracţiune integrală are la bază transmisia spate) atunci când aceasta nu are deloc aderenţă. Aproape toate modelele cu o singură excepţie au trecut această probă.
Testul s-a desfăşurat pe durata a două zile pe poligonul de la Vairano. În prima probă am vrut să verificăm abilitatea sistemului de tracţiune integrală de a transfera cuplul pe cealaltă punte decât cea antrenată în mod normal de motor (faţă când sistemul de tracţiune integrală are la bază transmisia faţă şi spate când sistemul de tracţiune integrală are la bază transmisia spate) atunci când aceasta nu are deloc aderenţă. Aproape toate modelele cu o singură excepţie au trecut această probă.
Excepţia s-a numit Toyota RAV4 Hybrid care nu a reuşit să treacă această probă. Aşezată cu roţile faţă pe standul cu role, deci aderenţă zero pe puntea antrenată de motorul termic, Toyota RAV4 Hybrid nu a reuşit să plece de pe loc deoarece motorul electric care antrenează roţile spate nu a fost capabil să îi ofere forţă de tracţiune suficientă. A fost primul semnal de alarmă al acestui test.
Către aderenţă zero

Şi acum să înceapă testele adevărate. Am fixat echipamentele de măsură şi două camere video legate la un computer pentru a detecta mişcarea roţilor faţă, respectiv spate. Primul concurent la examen a fost Jeep
Renegade. Acesta a fost pus cu roţile din stânga pe role, simulând deci gheaţa cea mai alunecoasă şi cu cele din dreapta pe o suprafaţă care imită asfaltul uscat. Cuplăm cutia de viteze automată în Drive, selectăm modul Auto din selectorul Selec Terrain şi accelerăm lent. Pentru circa o secundă roţile din stânga se rotesc în gol, apoi mişcarea lor încetineşte, sistemul 4×4 transferă cuplul spre roţile din dreapta şi Jeep se mişcă înainte.
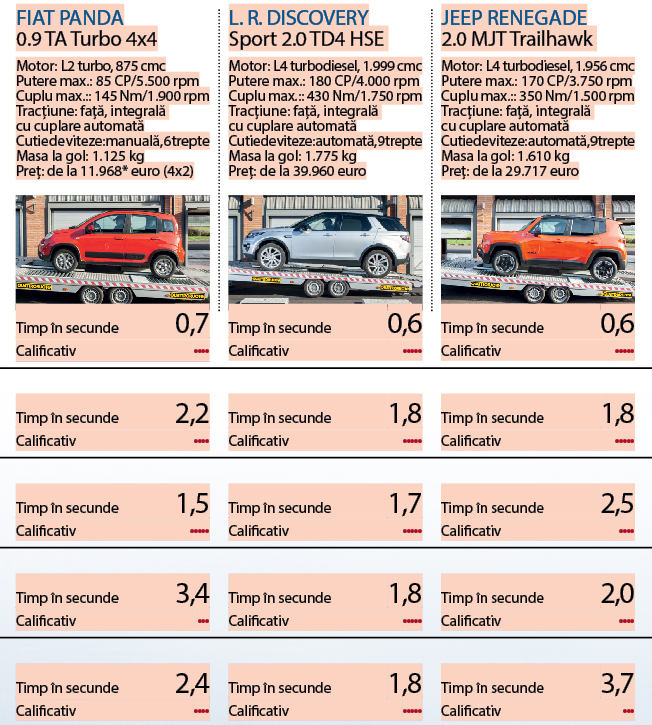
Schimbăm apoi schema şi de această dată roata stânga faţă şi cea dreapta spate sunt puse pe role şi nu au deloc aderenţă. În acest caz, Renegade are nevoie de un timp puţin mai lung, dar iese fără probleme. Continuăm apoi cu ultimele două situaţii în care trei roţi nu au aderenţă deloc. Renegade are nevoie de ceva mai mult timp, dar absolvă cu brio proba. SUV-ul american produs în Italia îşi justifică blazonul.

Acum e rândul celorlaţi competitori. Unul după altul, toate celelalte 13 maşini trec cu răbdare prin aceleaşi teste. E nevoie de răbdare şi pentru testeri. Trebuie accelerat moderat şi cu atenţie pentru că altfel riscam să cădem cu maşinile de pe rampa mobilă. Din nou, Toyota RAV4 Hybrid ne-a dezamăgit. SUV-ul hibrid japonez nu a reuşit să treacă două probe: cea cu ambele roţi de pe partea stângă puse pe role şi nici cea cu trei roţi fără aderenţă (cele două din faţă şi una din roţile spate). Explicaţia este că motorul electric nu are suficientă forţă de tracţiune şi după câteva secunde pare secătuit de energie fără a adăuga că şi transferul de cuplu între roţile faţă nu este prea eficient. Morala: este evident că pentru Toyota sistemul hibrid a fost prioritatea numărul 1, iar sistemul de tracţiune integrală nu are motricitatea cerută unui SUV.

Toate celelalte modele au trecut testul chiar dacă au fost unele care nu ne-au convins pe deplin.
Spre exemplu, Volkswagen Passat Alltrack nu a fost prea rapid la proba cu trei roţi cu aderenţă zero (cele două din faţă şi una spate). Astfel, Passat Alltrack a avut nevoie de 5,2 secunde pentru a parcurge distanţa de 120 cm necesară pentru a ieşi din zona rolelor. Acest timp pare o eternitate pe lângă cele doar 1,8 secunde necesare lui Land Rover Discovery Sport, care utilizează un sistem de tracţiune integrală similar, cu cuplaj Haldex de ultimă generaţie, ambele având motoarele amplasate transversal. De asemenea, Subaru XV a avut nevoie de numai 1,6 secunde pentru a absolvi aceeaşi probă, sistemul său 4×4 simulând existenţa a trei diferenţiale. Trebuie să mai menţionăm şi de ce un timp aşa de lung nu e optim. Rămânând un timp atât de mare cu trei roţi pe gheaţă, nu mai ai controlul deplin al maşinii, care riscă să intre într-o derivă laterală, greu de stăpânit.
Și acum modelele nobile …

Printre maşinile cu motorul amplasat longitudinal şi care, de regulă, au tracţiunea pe roţile din spate, cel mai mult ne-a impresionat Jaguar XE. Apărut destul de recent, XE are un sistem de tracţiune integrală foarte eficient. Softul care controlează totul este grijuliu şi bine calibrat reacţionând rapid şi progresiv. Chiar şi în cele mai dezavantajoase condiţii, cu trei roţi private de aderenţă (ambele roţi spate şi o roată faţă), XE se mişcă în câteva momente şi foarte decis.

Însă nu poţi să spui acelaşi lucru despre BMW 320d GT. Sistemul de tracţiune integrală xDrive de la BMW, care pe hârtie are o construcţie similară cu a sedanului britanic, lucrează bine, dar are nevoie de timpi mai lungi. Mai în clar, modelul german are nevoie de intervale de timp duble cu toate problemele de manevrabilitate care apar de aici, mai ales atunci când se doreşte urcarea unei pante.
 Practic, timpii mai lungi înseamnă afectarea stabilităţii la plecarea din pantă şi în astfel de cazuri e bine să lăsaţi maşina să coboare uşor înapoi şi să încercaţi din nou cu calm decât să bruscaţi transmisia sau motorul.
Practic, timpii mai lungi înseamnă afectarea stabilităţii la plecarea din pantă şi în astfel de cazuri e bine să lăsaţi maşina să coboare uşor înapoi şi să încercaţi din nou cu calm decât să bruscaţi transmisia sau motorul.
Revenind la maşinile cu motorul amplasat transversal, o frumoasă surpriză a reprezentat-o Nissan Qashqai, care are un sistem de tracţiune integrală similar cu cel de la Dacia Duster. Favorizat de o masă relativ redusă, Qashqai a dovedit un bun temperament. Qashqai a absolvit cele cinci teste cu timpi foarte buni, apropiaţi de ai specialistului pe gheaţă Subaru XV.

Şi cine este regina off-roadului? Land Rover Discovery Sport a obţinut de asemenea timpi foarte buni şi impresia noastră a fost că testele au fost joacă de copil pentru Discovery Sport care are rezerve de tracţiune foarte mari.
Aceasta a fost impresia noastră subiectivă. Strict obiectiv, în paginile următoare găsiţi rezultatele tuturor celor cinci teste pentru fiecare maşină și aprecieri privind comportamentul.
Iată și rezultatele finale:
Sedanuri și breakuri
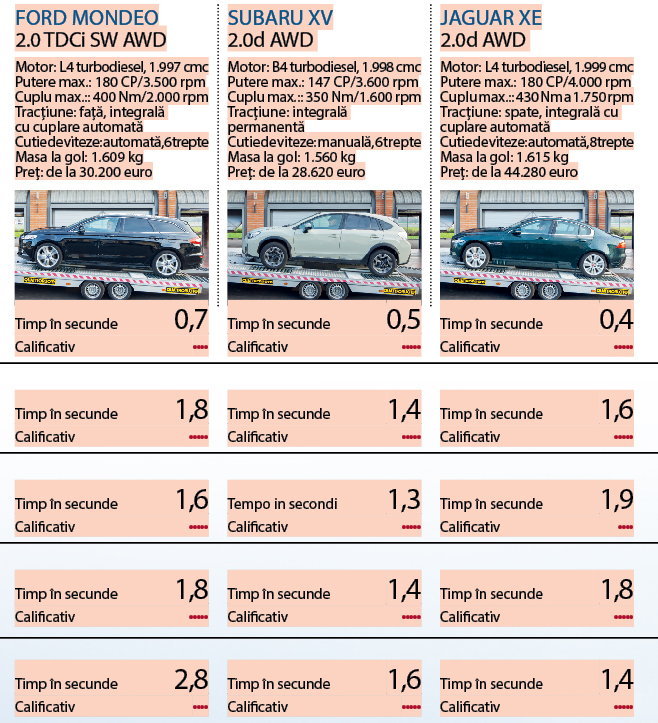 Înainte de a citi aceste concluzii trebuie să luaţi în considerare că rezultatele din aceste pagini nu reprezintă o evaluare globală a eficienţei sistemelor de tracţiune integrală. Evaluarea noastră se referă doar la capacitatea de a porni din pantă în condiţii critice de aderenţă realizată printr-o serie de teste specifice. Astfel, în tabele veţi găsi pentru fiecare tip de test (cu roţile faţă sau spate cu aderenţă zero, cele două roţi laterale cu aderenţă zero, roata dreapta faţă şi stânga spate sau invers cu aderenţă zero, situaţia cea mai critică cu trei roţi cu aderenţă zero) timpul în secunde necesar ca fiecare maşină să părăsească zona rolelor (valori măsurate) dar şi o evaluare subiectivă a comportamentului maşinii exprimată prin stele. Primul test verifică capacitatea de tracţiune când roţile punţii motoare sunt plasate pe role având aderenţă zero. Acest prim test a fost absolvit cu bine de toate modelele din prima categorie. Cu un timp care variază de la 0,4 la 0,7 secunde, toate modelele au reuşit să transfere cuplul către puntea cu mai multă aderenţă.
Înainte de a citi aceste concluzii trebuie să luaţi în considerare că rezultatele din aceste pagini nu reprezintă o evaluare globală a eficienţei sistemelor de tracţiune integrală. Evaluarea noastră se referă doar la capacitatea de a porni din pantă în condiţii critice de aderenţă realizată printr-o serie de teste specifice. Astfel, în tabele veţi găsi pentru fiecare tip de test (cu roţile faţă sau spate cu aderenţă zero, cele două roţi laterale cu aderenţă zero, roata dreapta faţă şi stânga spate sau invers cu aderenţă zero, situaţia cea mai critică cu trei roţi cu aderenţă zero) timpul în secunde necesar ca fiecare maşină să părăsească zona rolelor (valori măsurate) dar şi o evaluare subiectivă a comportamentului maşinii exprimată prin stele. Primul test verifică capacitatea de tracţiune când roţile punţii motoare sunt plasate pe role având aderenţă zero. Acest prim test a fost absolvit cu bine de toate modelele din prima categorie. Cu un timp care variază de la 0,4 la 0,7 secunde, toate modelele au reuşit să transfere cuplul către puntea cu mai multă aderenţă.
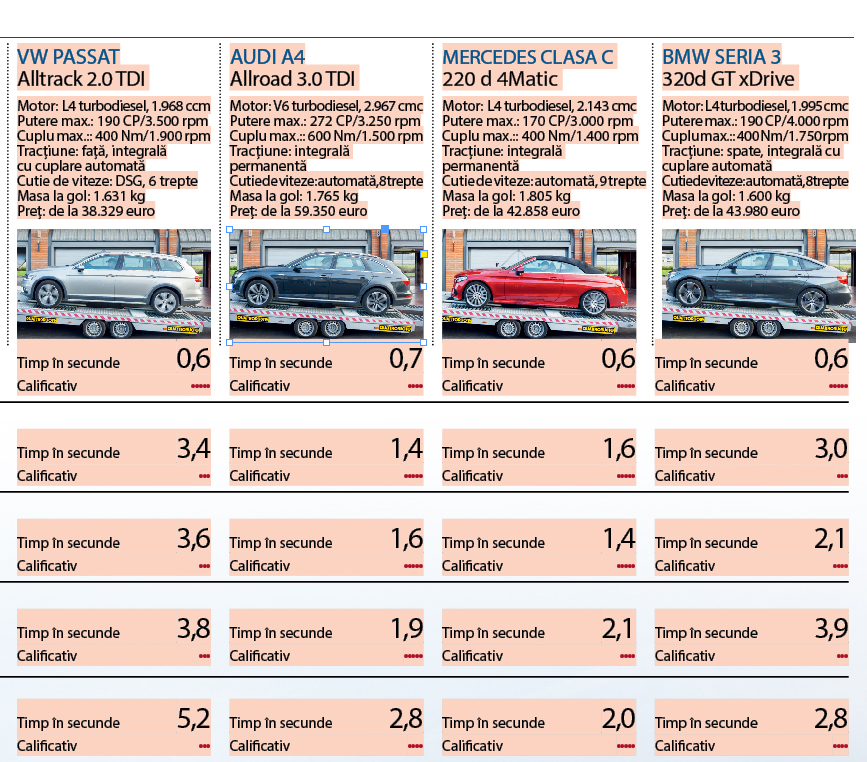 În testele următoare când am vrut să verificăm eficienţa în situaţii critice, cu trei roţi private de aderenţă, lucrurile s-au schimbat. VW Passat Alltrack şi BMW 320d GT au avut de suferit la această probă extremă. Trebuie să notăm totuşi că cele două modele au reuşit să treacă această probă, dar timpii de a ieşi din aceste situaţii au fost foarte lungi, de patru ori mai mari decât al celui mai bun timp în cazul lui VW. 320d GT a fost ceva mai rapid, dar diferenţa faţă de Jaguar XE care utilizează un sistem similar este evidentă. Cel mai bun şi mai rapid a fost însă Subaru XV cu schema sa mecanică cu trei diferenţiale care a ieşit din orice situaţie în câteva momente. Foarte bune şi rezultatele lui Mercedes Clasa C şi Audi A4 Allroad (cu excepţia ultimei probe).
În testele următoare când am vrut să verificăm eficienţa în situaţii critice, cu trei roţi private de aderenţă, lucrurile s-au schimbat. VW Passat Alltrack şi BMW 320d GT au avut de suferit la această probă extremă. Trebuie să notăm totuşi că cele două modele au reuşit să treacă această probă, dar timpii de a ieşi din aceste situaţii au fost foarte lungi, de patru ori mai mari decât al celui mai bun timp în cazul lui VW. 320d GT a fost ceva mai rapid, dar diferenţa faţă de Jaguar XE care utilizează un sistem similar este evidentă. Cel mai bun şi mai rapid a fost însă Subaru XV cu schema sa mecanică cu trei diferenţiale care a ieşit din orice situaţie în câteva momente. Foarte bune şi rezultatele lui Mercedes Clasa C şi Audi A4 Allroad (cu excepţia ultimei probe).
Sport Utility Vehicle
Chiar şi printre SUV-uri care sunt considerate specialişti în tracţiune integrală există surprize. Ne referim aici la Toyota RAV4 Hybrid, cea mai originală dintre toate, la care puntea spate este pusă în mişcare de un motor electric. Din păcate, acest sistem de tracţiune integrală este integral doar pe hârtie nu şi în realitate. Motorul electric are rolul de a limita consumul în oraş şi de a garanta o mobilitate fără emisii, capitol la care Toyota a reuşit să obţină o eficienţă deosebită. Însă, acest sistem nu e adecvat pentru a asigura aderenţă în situaţii critice. În cele cinci teste desfăşurate, SUV-ul japonez a absolvit doar două dintre ele, ceea ce nu califică RAV4 Hybrid ca o integrală adevărată.
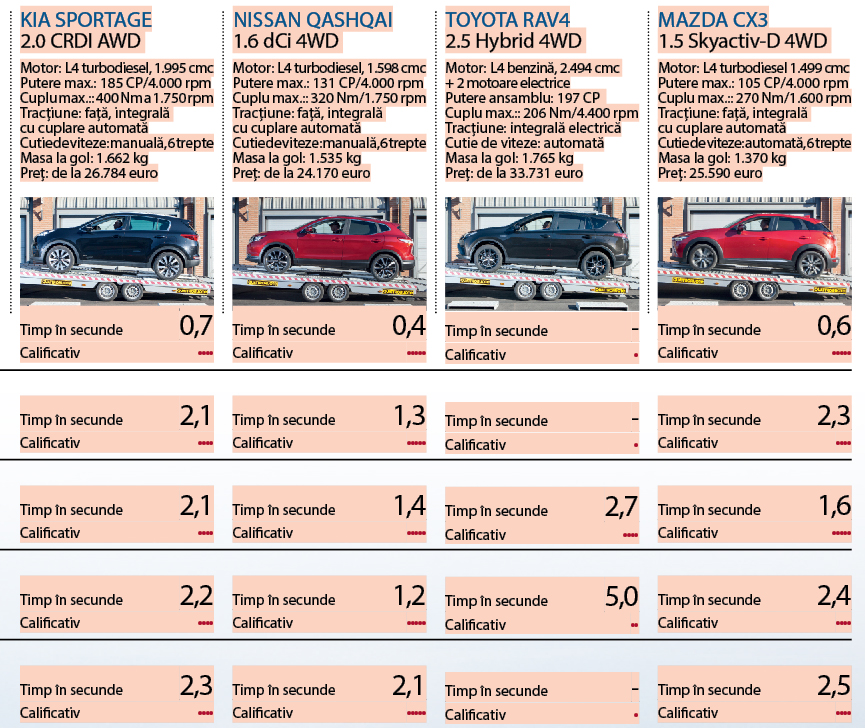 O a doua surpriză, de această dată pozitivă şi plăcută, tot din Ţara Soarelui Răsare, a fost Nissan Qashqai, al cărui sistem de tracţiune integrală s-a dovedit cel mai rapid în reacţii de departe la patru din cele cinci teste. Doar la proba care simulează situaţia cea mai critică, cu o singură roată având aderenţă, Land Rover Discovery Sport a fost puţin mai rapid. Subiectiv, nouă ni s-a părut că Discovery Sport nu se sperie de nimic fiind cel mai capabil dintre toate modelele din test. Rezultate bune au obţinut Kia Sportage, Jeep Renegade dar şi micuţul Fiat Panda 4×4. Ultimele două au avut nevoie de ceva mai mult timp să iasă din situaţiile critice, dar au conferit încredere celui de la volan. Şi Mazda CX-3 a absolvit cu bine testele diferite de tracţiune, dar a avut nevoie de mai multe manevre din volan pentru a menţine traiectoria dorită.
O a doua surpriză, de această dată pozitivă şi plăcută, tot din Ţara Soarelui Răsare, a fost Nissan Qashqai, al cărui sistem de tracţiune integrală s-a dovedit cel mai rapid în reacţii de departe la patru din cele cinci teste. Doar la proba care simulează situaţia cea mai critică, cu o singură roată având aderenţă, Land Rover Discovery Sport a fost puţin mai rapid. Subiectiv, nouă ni s-a părut că Discovery Sport nu se sperie de nimic fiind cel mai capabil dintre toate modelele din test. Rezultate bune au obţinut Kia Sportage, Jeep Renegade dar şi micuţul Fiat Panda 4×4. Ultimele două au avut nevoie de ceva mai mult timp să iasă din situaţiile critice, dar au conferit încredere celui de la volan. Şi Mazda CX-3 a absolvit cu bine testele diferite de tracţiune, dar a avut nevoie de mai multe manevre din volan pentru a menţine traiectoria dorită.
Cum am testat?
 Pentru testul sistemelor de tracţiune integrală am utilizat un echipament dezvoltat de Arcus di Sona (VR) dotat cu două platforme având o pantă mică pe care au fost plasate patru seturi de role care se învârt liber fără frânare. Aceste role simulează aderenţa zero care în viaţa reală echivalează cu gheaţa perfectă de pe un patinoar. Aceasta este cea mai dificilă situaţie cu care se poate întâlni un şofer. Fiecare set de role poate fi acoperit cu un înveliş metalic, putând simula orice tip de aderenţă: o roată pe gheaţă, roţile faţă sau cele spate pe gheaţă, două roţi în diagonală pe gheaţă sau situaţia cea mai critică cu doar o singură roată având aderenţă. Datorită acestui echipament, se pot compara în aceleaşi condiţii toate sistemele de tracţiune integrală, evaluând rapiditatea şi eficienţa transferului de cuplu către roata sau roţile cu mai multă aderenţă şi eventual necesitatea corecţiei din volan pentru a compensa posibilele drifturi.
Pentru testul sistemelor de tracţiune integrală am utilizat un echipament dezvoltat de Arcus di Sona (VR) dotat cu două platforme având o pantă mică pe care au fost plasate patru seturi de role care se învârt liber fără frânare. Aceste role simulează aderenţa zero care în viaţa reală echivalează cu gheaţa perfectă de pe un patinoar. Aceasta este cea mai dificilă situaţie cu care se poate întâlni un şofer. Fiecare set de role poate fi acoperit cu un înveliş metalic, putând simula orice tip de aderenţă: o roată pe gheaţă, roţile faţă sau cele spate pe gheaţă, două roţi în diagonală pe gheaţă sau situaţia cea mai critică cu doar o singură roată având aderenţă. Datorită acestui echipament, se pot compara în aceleaşi condiţii toate sistemele de tracţiune integrală, evaluând rapiditatea şi eficienţa transferului de cuplu către roata sau roţile cu mai multă aderenţă şi eventual necesitatea corecţiei din volan pentru a compensa posibilele drifturi.
Iată toate tipurile de sisteme de tracţiune integrală
- Sistem 4×4 derivat din tracţiune faţă: roţile spate cuplează doar la nevoie
 Majoritatea sistemelor de tracţiune integrală actuale derivă din tracţiunea faţă normală combinată cu motoarele amplasate transversal. Mişcarea este transmisă roţilor spate printr-un arbore montat la 90 grade. Însă acesta nu este conectat direct cu diferenţialul. Între cele două este montat un ambreiaj multidisc controlat de un motor electric şi care la rândul lui este controlat de unitatea de management a sistemului 4×4. Când aderenţa este bună, ambreiajul multidisc este deschis şi nu există nicio conexiune între motor şi roţile spate. Dacă una sau ambele roţi faţă patinează, ambreiajul se închide şi se transferă o parte din cuplu spre spate.
Majoritatea sistemelor de tracţiune integrală actuale derivă din tracţiunea faţă normală combinată cu motoarele amplasate transversal. Mişcarea este transmisă roţilor spate printr-un arbore montat la 90 grade. Însă acesta nu este conectat direct cu diferenţialul. Între cele două este montat un ambreiaj multidisc controlat de un motor electric şi care la rândul lui este controlat de unitatea de management a sistemului 4×4. Când aderenţa este bună, ambreiajul multidisc este deschis şi nu există nicio conexiune între motor şi roţile spate. Dacă una sau ambele roţi faţă patinează, ambreiajul se închide şi se transferă o parte din cuplu spre spate.
2. Sistem 4×4 derivat din transmisie spate
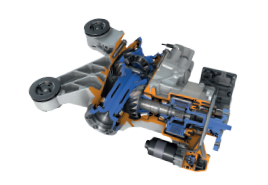
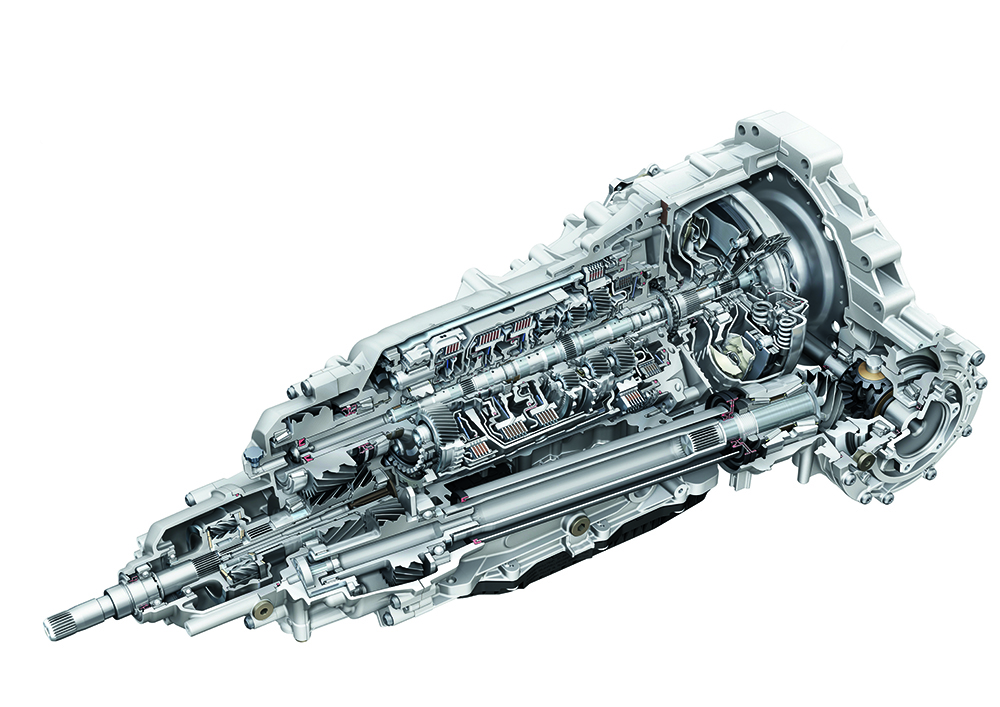
 La maşinile cu tracţiune spate, acţionarea roţilor faţă se face prin intermediul unei cutii de transfer, care trimite cuplul către diferenţialul faţă cu ajutorul unui angrenaj dinţat sau lanţ prin intermediul unui arbore cardanic (în fotografie schema de tracţiune de la Jaguar XE). La modelele vechi, cuplarea punţii faţă se făcea manual cu ajutorul unui levier mecanic. Astăzi, acest transfer se face automat graţie unui ambreiaj multidisc cu comandă electrică şi control electronic. Similar cu sistemele de tracţiune integrală având motoarele amplasate transversal faţă, şi aceste sisteme care au la bază transmisia spate sunt foarte rapide şi mai eficiente decât vechile sisteme cu viscocuplu având şi un management inteligent. De exemplu, poţi decide ca, la pornire, ambreiajul să fie închis pentru a transmite cuplul şi la roţile faţă chiar dacă aderenţa este bună pentru a obţine un demaraj mai rapid. Sau poţi transfera progresiv cuplul motor spre roţile faţă pentru a limita supravirarea şi a îmbunătăţi dinamica şi stabilitatea până intervine ESP-ul. Sau poţi menţine sistemul 4×4 cuplat dacă condiţiile atmosferice sunt vitrege şi plouă foarte tare. Aceste strategii de management ale sistemului de tracţiune integrală împreună cu frânarea selectivă a roţii sau roţilor care patinează permit distribuţia optimă a cuplului motor pentru o pornire eficientă dar şi pentru îmbunătăţirea substanţială a siguranţei în conducere.
La maşinile cu tracţiune spate, acţionarea roţilor faţă se face prin intermediul unei cutii de transfer, care trimite cuplul către diferenţialul faţă cu ajutorul unui angrenaj dinţat sau lanţ prin intermediul unui arbore cardanic (în fotografie schema de tracţiune de la Jaguar XE). La modelele vechi, cuplarea punţii faţă se făcea manual cu ajutorul unui levier mecanic. Astăzi, acest transfer se face automat graţie unui ambreiaj multidisc cu comandă electrică şi control electronic. Similar cu sistemele de tracţiune integrală având motoarele amplasate transversal faţă, şi aceste sisteme care au la bază transmisia spate sunt foarte rapide şi mai eficiente decât vechile sisteme cu viscocuplu având şi un management inteligent. De exemplu, poţi decide ca, la pornire, ambreiajul să fie închis pentru a transmite cuplul şi la roţile faţă chiar dacă aderenţa este bună pentru a obţine un demaraj mai rapid. Sau poţi transfera progresiv cuplul motor spre roţile faţă pentru a limita supravirarea şi a îmbunătăţi dinamica şi stabilitatea până intervine ESP-ul. Sau poţi menţine sistemul 4×4 cuplat dacă condiţiile atmosferice sunt vitrege şi plouă foarte tare. Aceste strategii de management ale sistemului de tracţiune integrală împreună cu frânarea selectivă a roţii sau roţilor care patinează permit distribuţia optimă a cuplului motor pentru o pornire eficientă dar şi pentru îmbunătăţirea substanţială a siguranţei în conducere.
3. Sistem 4×4 permanent
 Dacă în locul cuplajului central sub forma unui ambreiaj multidisc se montează un diferenţial, cuplul este distribuit constant între cele patru roţi. Acest sistem se numeşte tracţiune integrală permanentă fiind prezent dintre maşinile de test la Audi A4 (sistemul Quattro de la Audi pentru motoarele montate longitudinal include diferenţial central, arbore de transmisie şi diferenţial faţă), Mercedes Clasa C şi Subaru XV. Acest sistem vă permite să beneficiaţi la maximum de aderenţa pneurilor, asigură un comportament neutru în viraje şi este utilizat în general la maşinile cu motoare mai puternice, care pot transmite astfel la sol toată puterea.
Dacă în locul cuplajului central sub forma unui ambreiaj multidisc se montează un diferenţial, cuplul este distribuit constant între cele patru roţi. Acest sistem se numeşte tracţiune integrală permanentă fiind prezent dintre maşinile de test la Audi A4 (sistemul Quattro de la Audi pentru motoarele montate longitudinal include diferenţial central, arbore de transmisie şi diferenţial faţă), Mercedes Clasa C şi Subaru XV. Acest sistem vă permite să beneficiaţi la maximum de aderenţa pneurilor, asigură un comportament neutru în viraje şi este utilizat în general la maşinile cu motoare mai puternice, care pot transmite astfel la sol toată puterea.
4. Sistem 4×4 hibrid
 Toyota RAV4 Hybrid are un sistem 4×4 neconvenţional deoarece puntea spate nu este antrenată de motorul termic prin intermediul unui arbore de transmisie şi ambreiajul multidisc sau diferenţialul central lipseşte. Puntea spate este antrenată de un motor electric de 50 kW în cazul lui RAV4 Hybrid montat la puntea spate. Această soluţie este posibilă datorită bateriei sistemului hibrid care este capabilă să furnizeze energia necesară motorului la pornire. Astfel, puntea faţă şi puntea spate sunt acţionate complet independent, neexistând legătură mecanică între ele. Motorul electric este activ la start şi în cazul în care puntea faţă pierde aderenţa. Însă din cauză că motorul termic nu acţionează deloc puntea spate, există limitări de tracţiune deoarece motorul electric nu are suficientă forţă de tracţiune în situaţii critice cu aderenţă aproape de zero a punţii faţă. RAV4 Hybrid nu este singurul SUV cu sistem de tracţiune integrală electric. Lexus a fost primul care a adoptat acest sistem la RX 350h, utilizat apoi şi la Lexus NX, la Citroen DS5 Hybrid, dar şi la mai noul Volvo XC90 T8.
Toyota RAV4 Hybrid are un sistem 4×4 neconvenţional deoarece puntea spate nu este antrenată de motorul termic prin intermediul unui arbore de transmisie şi ambreiajul multidisc sau diferenţialul central lipseşte. Puntea spate este antrenată de un motor electric de 50 kW în cazul lui RAV4 Hybrid montat la puntea spate. Această soluţie este posibilă datorită bateriei sistemului hibrid care este capabilă să furnizeze energia necesară motorului la pornire. Astfel, puntea faţă şi puntea spate sunt acţionate complet independent, neexistând legătură mecanică între ele. Motorul electric este activ la start şi în cazul în care puntea faţă pierde aderenţa. Însă din cauză că motorul termic nu acţionează deloc puntea spate, există limitări de tracţiune deoarece motorul electric nu are suficientă forţă de tracţiune în situaţii critice cu aderenţă aproape de zero a punţii faţă. RAV4 Hybrid nu este singurul SUV cu sistem de tracţiune integrală electric. Lexus a fost primul care a adoptat acest sistem la RX 350h, utilizat apoi şi la Lexus NX, la Citroen DS5 Hybrid, dar şi la mai noul Volvo XC90 T8.


